Quadruped Robot Learns to Walk via RL on Real Hardware
About this project
A four-legged robot with zero pre-programmed movement that teaches itself to walk from scratch through thousands of real-hardware trial-and-error attempts.
Files
53 Files
Sign in to view this file
Viewing files on ForgeHub is free. Sign in or create an account to open the interactive viewer and download files.
Sign in to viewRelated Projects
Underwater ROV with Real-Time Sonar SLAM
A tethered underwater robot that builds a real-time 3D map of its environment using sound waves instead of GPS or cameras.
Tyler Montgomery
Jun 25, 2026
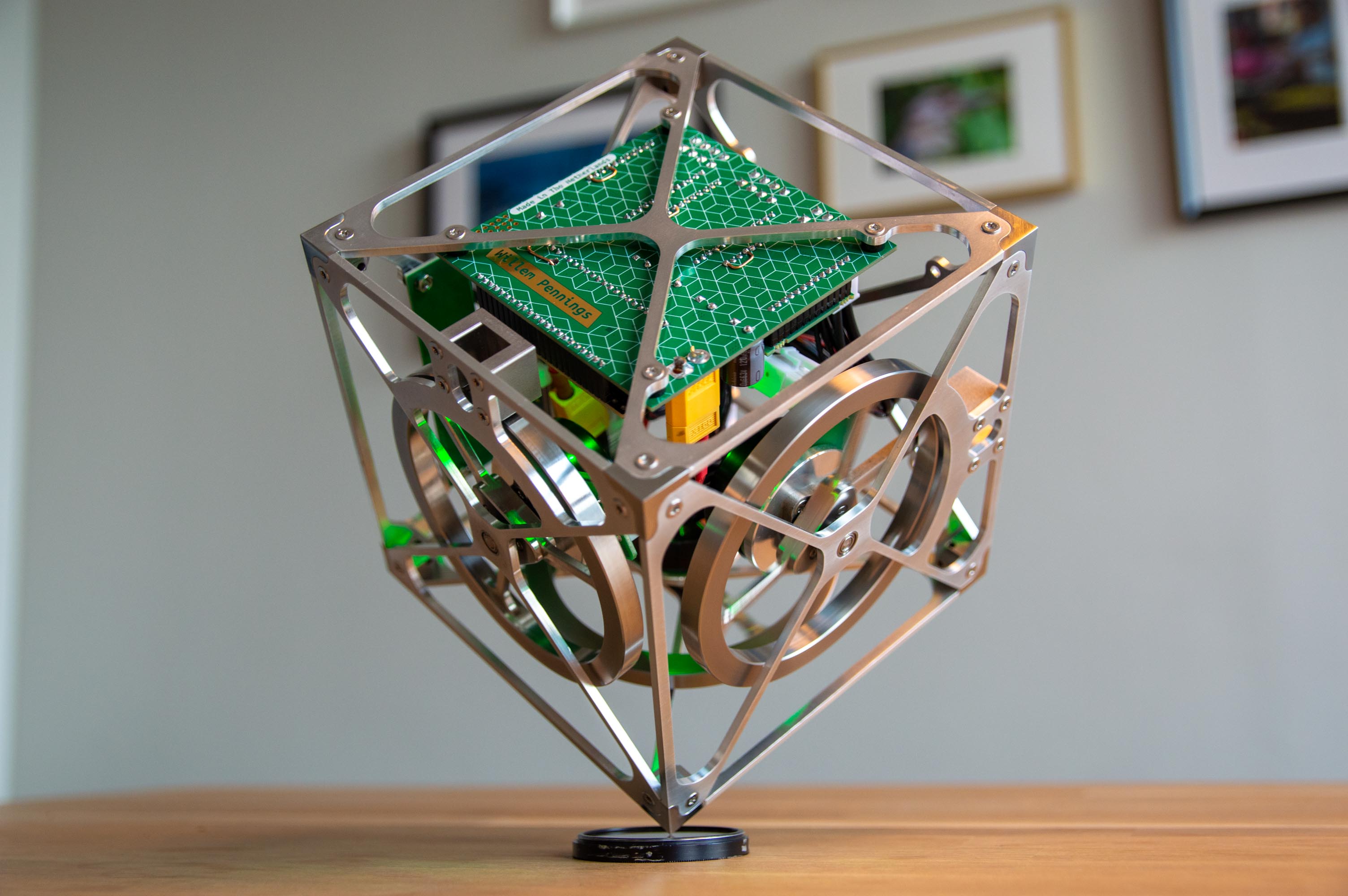
Self-Balancing Cube with Reaction Wheels
A small cube that balances on a single corner by spinning internal reaction wheels to generate counter-torque against gravity in real time.
Sarah Williams
Jun 25, 2026
Thermal Management System for EV Battery Pack
Liquid cooling plate design for a 96S prismatic LFP battery pack. Conjugate heat transfer analysis and flow distribution optimization across 12 parallel channels.
Marcus Chen
May 18, 2026